U.C. 1: Reconocer el Funcionamiento de los Sensores de Proximidad Industriales.
E.C. 1: Reconocer el Funcionamiento del Sensor de Proximidad Inductivo.
Los detectores de proximidad inductivos son la elección preferida para la mayoría de las aplicaciones que requieren fiabilidad, en la detección sin contacto, de objetos metálicos en las máquinas o equipos de automatización.
Los sensores inductivos proporcionan detección de objetos metálicos sin contacto. Un sensor inductivo contiene una bobina y un oscilador a través de los cuales se crea un campo electromagnético que se propaga desde la superficie frontal del sensor. La presencia de un objeto de metal frente a la superficie activa provoca que la amplitud de oscilación del campo magnético disminuya debido a las corrientes Foucault inducidas que pasan del objeto de metal. Luego, el circuito interno del sensor mide la disminución de su campo magnético generado debido a la presencia del objeto de metal.

Cuando se considera la detección de piezas pequeñas, el tamaño de la superficie activa del sensor inductivo desempeña un papel importante. Actualmente, los sensores inductivos disponibles en el mercado pueden alcanzar tamaños de hasta 3 mm de diámetro, lo que representa una diferencia de tamaño considerable en comparación con los diámetros estándares de 18 mm.
El tamaño del objetivo recomendado para lograr un rango de detección completo para un sensor inductivo se basa en las siguientes dos reglas, la que sea mayor:
- El tamaño del objetivo debe ser igual al diámetro de la cara del sensor.
- El tamaño del objetivo debe ser 3 veces el del rango de detección si el valor es mayor que el diámetro.
Los detectores inductivos son actualmente indispensables en el uso industrial. En comparación con los detectores mecánicos, éstos ofrecen condiciones casi ideales: funcionamiento sin contacto libre de desgaste, así como alta frecuencia y precisión de detección. Además no son sensibles a vibraciones, polvo o humedad. Los sensores inductivos detectan sin contacto todos los metales.
Partes de un Sensor Inductivo.

Aplicaciones del sensor inductivo.
La principal aplicación del sensor inductivo es la detección de piezas metálicas. Debido a su funcionamiento y que no existe un contacto físico con la pieza se utiliza para:
- Contaje de piezas metálicas
- Analizar su posición
- Determinar forma de objetos metálicos • Clasificar materiales
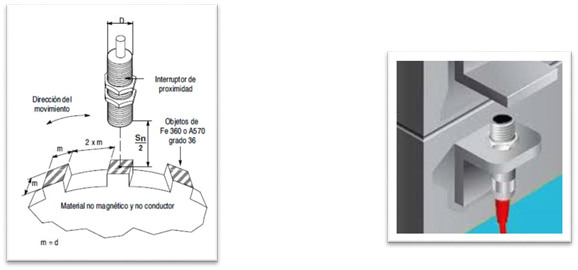 Fig. 3 y 4 Sensores de proximidad en aplicación de contador y posicionamiento.
Fig. 3 y 4 Sensores de proximidad en aplicación de contador y posicionamiento.
E.C 2: Reconocer las partes y aplicación del sensor de proximidad capacitivo.
Los sensores capacitivos proporcionan detección sin contacto de todo tipo de objetos, que incluye desde aislantes a conductores. Un sensor capacitivo usa el principio de capacitancia para detectar objetos. La capacitancia es la capacidad de un sistema para almacenar una carga eléctrica. En términos simples: un sensor capacitivo detecta el cambio de capacitancia cuando un objeto entra en su campo eléctrico.

Cuando se considera la detección de piezas pequeñas, el tamaño de la superficie activa del sensor capacitivo desempeña un papel importante. la regla general para una detección óptima es que el tamaño del objetivo debe ser, al menos, igual al de la superficie activa del sensor. La razón de esto es que, si el tamaño del objetivo es más pequeño que el de la superficie activa del sensor, el campo eléctrico viajaría alrededor del objetivo y causaría lecturas poco confiables.
Al considerar la regla general y comparar un sensor capacitivo en miniatura de 4 mm de diámetro con un sensor capacitivo estándar de 18 mm de diámetro, es simple determinar que el sensor capacitivo de 4 mm de diámetro puede detectar en forma confiable un objetivo mucho más pequeño (4 mm) que el sensor capacitivo de 18 mm de diámetro (18 mm)
Fig.6 Partes de un Sensores de proximidad capacitivo

Fig.7 Aplicaciones de un sensor capacitivo.

E.C 3: Identificar el tipo de salida de sensor de proximidad.
En este tipo de transductores, la salida sólo puede presentar dos estados: activa o no activa. Un ejemplo de transductor todo-nada muy utilizado son los detectores de presencia en sus distintos tipos (inductivos, capacitivos, ópticos,)
Este tipo de Salida puede ser:
- Electromecánica (contacto N.O y N.C)
- Salida transistorizada PNP (Positiva) y NPN (Negativa)
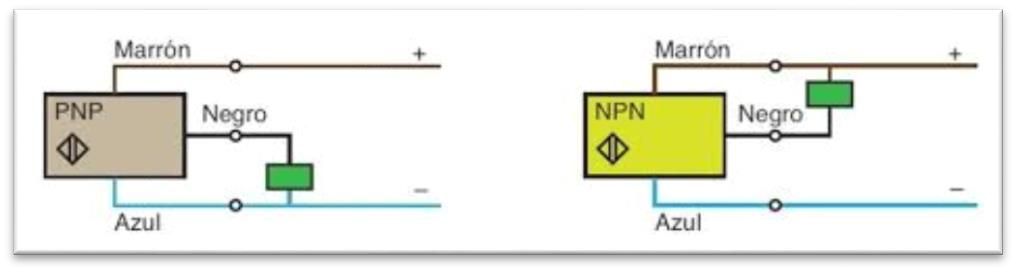
Fig.8 Tipos de salidas transistorizadas
Ventajas salidas electromecánica:
- Pueden operar como contacto NO o NC según se realice la conexión.
- Operar en variedad de voltajes.
- Operar con mayor capacidad de manejo de corrientes.
Desventajas salidas electromecánica:
- Baja frecuencia de conmutación.
- Las salidas sufren desgastes debido al uso. Mayor tamaño.
Ventajas de salida transistorizada
- Alta frecuencia de conmutación
- Compacta
- Bajo costo
Desventajas de salida transistorizada:
- Limitada a un rango de corriente
- Limitada a un rango de voltaje
E.C 4: Identificar las características de un sensor de proximidad fotoeléctrico.
Los sensores fotoeléctricos usan un haz de luz para detectar la presencia o la ausencia de un objeto. Esta tecnología es una alternativa ideal a sensores de proximidad inductivos cuando se requieren distancias de detección largas o cuando el ítem que se desea detectar no es metálico.

Los sensores fotoeléctricos satisfacen aplicaciones que se encuentran en muchas industrias, tales como manejo de materiales, empaquetado, procesamiento de alimentos y transporte.
Detección sin contacto.
Gracias a que la detección sin contacto es posible, se evitan daños a los objetos. Además, el mismo sensor no se dañará lo que garantiza una larga vida útil y un funcionamiento sin mantenimiento.

Casi todos los materiales son detectables.
Dado que el sensor detecta los objetos, ya sea en base a su reflectividad o a la cantidad de luz interrumpida, casi todos los tipos de materiales son detectables. Esto incluye vidrio, metal, plástico, madera y líquidos.

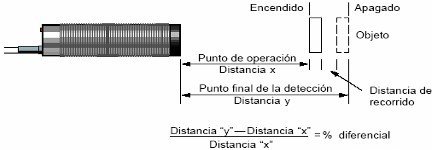
Histéresis.
La histéresis, o desplazamiento diferencial, es la diferencia entre los puntos de operación (conectado) y liberación (desconectado) cuando el objeto se aleja de la cara del sensor y se expresa como un porcentaje de la distancia de detección. Sin una histéresis suficiente, el sensor de proximidad se conecta y desconecta continuamente al aplicar una vibración excesiva al objeto o al sensor, aunque se puede ajustar mediante circuitos adicionales.
Repetitividad.
La repetitividad es la capacidad de un sensor de detectar el mismo objeto a la misma distancia todo el tiempo. Esta cifra se expresa como porcentaje de la distancia de detección nominal y se basa en una temperatura ambiental y voltaje eléctrico constantes.

Frecuencia de conmutación.
La frecuencia de conmutación corresponde a la cantidad de conmutaciones por segundo que se pueden alcanzar en condiciones normales. En términos más generales, es la velocidad relativa del sensor.

Operación por luz/oscuridad.
Los términos de operación por luz y operación por oscuridad se utilizan para describir la acción de la salida de un sensor cuando un objeto está presente o no.
La salida de operación por luz está encendida (activada, nivel lógico uno) cuando el receptor “ve” suficiente luz proveniente de la fuente de luz. En el caso de la detección de haz transmitido y retrorreflectiva, la salida de operación por luz está encendida cuando no hay ningún objeto y la luz puede desplazarse desde la fuente de luz hasta el receptor.
En el caso de la detección difusa (de todos los tipos), la salida está encendida cuando el objeto está presente y refleja luz desde la fuente de luz hasta el receptor.

La salida de operación por oscuridad está encendida (activada, nivel lógico “1”) cuando el receptor no “ve” la luz de la fuente de luz. En el caso de la detección de haz transmitido y retrorreflectiva, la salida de operación por oscuridad está encendida cuando el objeto está presente y la luz de la fuente de luz está bloqueada y no llega al receptor. En el caso de la detección difusa (de todos los tipos), la salida de operación por oscuridad está encendida cuando no hay ningún objeto.


Practica #1 Lectura e interpretación de datos de sensores inductivos y capacitivos
Desarrolle la actividad práctica en el laboratorio y siga las instrucciones ahí establecidas