U.C. 2: Identificar los tipos de sensores de proximidad para la industria
E.C 1: Diferenciar sensores fotoeléctricos y sensores inductivos.
Construcción física sensor de proximidad inductivo.

Construcción física sensor de proximidad fotoeléctrico.

Unas de las diferencias más notables entre los sensores de proximidad inductivos y fotoeléctricos son:
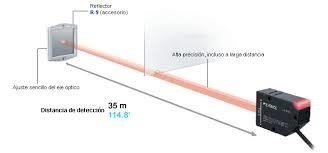
1. Larga distancia de detección en sensores fotoeléctricos.
Los sensores fotoeléctricos son generalmente de alta potencia y permiten una detección de largo alcance de hasta 70 metros, mientras en los sensores de proximidad inductivos nos limitamos a un rango de 1 mm a 10 mm dependiendo el modelo.
2. Robustez y fiabilidad de los sensores inductivos.
Debido a su construcción los sensores inductivos son más robustos que los sensores fotoeléctricos soportan altas temperaturas
Existen 3 tipos de sensores fotoeléctricos según su forma de operación:
1. Sensor de barrera Emisor-Reflector.
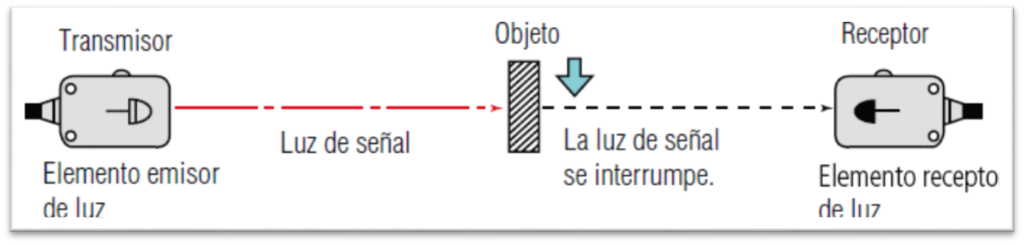
El transmisor y el receptor están separados. Cuando el objeto se encuentra entre el transmisor y el receptor, se interrumpe el haz de luz, de esta manera el sensor detecta la presencia de un objeto.
Ventajas:
- A causa del haz efectivo claramente definido, los sensores de haz transmitido suelen ser los más confiables para el conteo exacto de piezas.
- El uso de sensores de haz transmitido elimina la variable del color o la reflectividad de la superficie.
- Los sensores de haz transmitido ofrecen el margen más alto.
- Dada su capacidad de detectar a través de suciedad acumulada, polvo, bruma, condensación, aceite y películas de material, los sensores de haz transmitido son más confiables antes de que haga falta limpiarlos y, por ello, tienen un bajo costo de mantenimiento.
- Pueden detectar piezas pequeñas o posiciones precisas (utilizando pequeñas aberturas o fibras ópticas).
Desventajas:
- Las piezas muy pequeñas que no alcanzan a interrumpir el 50% del haz efectivo pueden ser difíciles de detectar con exactitud. Se pueden utilizar aberturas, lentes o fibras ópticas para definir el haz efectivo con una mayor precisión y obtener así una detección más confiable.
- Es posible que la detección de haz transmitido no sea la adecuada para detectar objetos translúcidos o transparentes.
2. Sensor Retro-reflectivo.
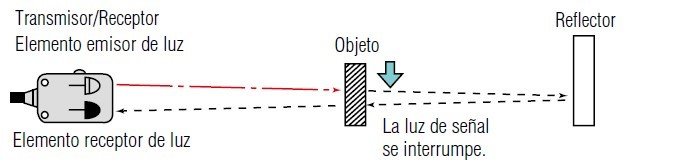
Tanto el emisor de luz como los elementos receptores están contenidas en un mismo recinto. La luz del elemento emisor incide en el reflector y regresa al elemento receptor de luz. Cuando hay un objeto presente, se interrumpe la luz.
Ventajas:
- Por lo general, cuando el cableado del sensor sólo se puede realizar desde un lado, se utiliza un sensor retrorreflectivo o retrorreflectivo polarizado en lugar de un sensor de haz transmitido siempre y cuando se pueda montar un reflector en el lado contrario.
- Siempre se debe optar por un sensor retrorreflectivo polarizado en lugar de un sensor retrorreflectivo para lograr la mayor exactitud.
Desventajas:
- Los sensores retro reflectivo tienen una distancia de detección más corta que los de haz transmitido.
- Evite utilizar sensores retrorreflectivos y retro reflectivo polarizados para el control de posiciones precisas o la detección de piezas pequeñas ya que generalmente resulta difícil crear un haz efectivo pequeño.
3. Sensor reflectivo o difuso.
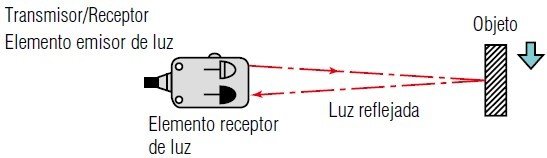
Tanto el emisor de luz como los elementos receptores están contenidos en una sola carcasa. El sensor recibe la luz reflejada desde el objeto.
Ventajas:
- Se pueden usar en aplicaciones en las que la distancia del sensor al objeto va de unos pocos milímetros a unos pocos metros y cuando no conviene aplicar una detección de haz transmitido ni una detección retrorreflectiva.
- Se pueden usar en aplicaciones que requieren de una mayor sensibilidad para captar las diferencias en la reflectividad de las superficies y cuando es importante monitorear las condiciones de las superficies relacionadas con esas diferencias de reflectividad.
Desventajas:
- Superficies brillantes: los sensores difusos utilizan lentes que maximizan la distancia de detección alineando su luz. Por ello, los objetos brillantes que no estén en ángulo perpendicular pueden resultar difíciles de detectar.
- La mayoría de los sensores difusos son menos tolerantes a la contaminación que los rodea y pierden el margen muy deprisa al acumularse suciedad y humedad en los lentes.
- Cuando lo esencial es realizar un conteo preciso, la detección difusa puede ser problemática y, por lo tanto, no representa la elección adecuada. De hecho, este tipo de sensor es poco confiable para detectar superficies irregulares, objetos de vidrio o brillantes, piezas pequeñas o piezas que pasan ante el sensor a distancias variables.
E.C 2: Diferenciar sensores capacitivos de otros sensores de proximidad.
Los sensores capacitivos operan igual que los sensores inductivos, sin contacto físico con el material a detectar. Los sensores de proximidad capacitivos permiten la detección tanto de materiales conductivos como no-conductivos, pero se usan principalmente para detectar materiales como plásticos, líquidos, materiales granulados, etc.

Ejemplos de sensores capacitivo marca Pepperl+Fuchs Ejemplos de sensores capacitivos marca SIEMENS.

Practica # 2
Practica #2 Lectura e interpretación de datos de sensores fotoeléctricos.
Desarrollé la actividad práctica en nuestros laboratorios y siga las instrucciones ahí establecidas.

Practica # 3
Practica #3 Identificar tipos de sensores de proximidad inductivos y capacitivos.
Desarrollé la actividad práctica en nuestros laboratorios y siga las instrucciones ahí establecidas.

Practica # 4
Practica #4 Identificar tipos de sensores de proximidad fotoeléctricos.
Desarrollé la actividad práctica en nuestros laboratorios y siga las instrucciones ahí establecidas.